Při programování je důležité určit míru efektivity algoritmu a případné kroky pro jeho optimalizaci. Mohlo by se zdát, že nejlepším řešením, jak zjistit, jak je program rychlý je změřit čas spuštění a čas ukončení programu a ty od sebe odečíst. Tím, ale je možné zjistit, jen jak se program chová pro jeden konkrétní vstup na jednom konkrétním zařízení. Poměrně běžně se pak stává, že lokálně na počítači vývojáře se zdá řešení efektivní, nicméně po nasazení do produkčního prostředí dochází ke zjištění, že je výpočet pomalý.
Ukázka
Následující program provede součet celých čísel { 1, 2, … 10 }.
int result = 0;
int min = 1;
int max = 10;
for (int i = min; i <= max; i++)
{
result += i;
}Otázka: Kolikrát musí proběhnout cyklus? Čísla se sčítají postupně a celkem čísel je 10, takže desetkrát. U této úlohy je však otázkou, jestli na tento problém je vhodné psát program, protože výsledek bude vždy stejný.
Co když ale horní mez nebude nastavena staticky, ale může ji zvolit uživatel programu. Kolikrát pak program proběhne? No tolikrát, jak je veliký vstup.
int result = 0;
int min = 1;
if(!int.TryParse(Console.ReadLine(), out int max))
{
Console.WriteLine("Nesprávný vstup");
return;
}
for (int i = min; i <= max; i++)
{
result += i;
}Kdy efektivitu řešit?
V případě, že vstup programu je malého rozsahu, tak neoptimální a optimální řešení bude dosahovat velmi podobných výsledků. Pokud se ale začne zvětšovat vstup, tak optimální řešení může být rychlejší o stovky i tisíce procent.
Asymptotická časová složitost
V praxi se často stává, že je nutné optimalizovat nějaký kód a tím vznikají dvě verze algoritmu, které řeší ten stejný problém. Tyto verze je následně potřebné porovnat a určit, která je rychlejší. Co ale znamená, že je rychlejší? To je nutné formalizovat.
Typy složitosti
- Časová složitost – doba výpočtu, která je potřebná pro vyřešení daného problému
- Paměťová složitost – velikost paměti, která je potřebná pro provedení výpočtu
Asymptotická složitost jako matematická funkce
Každému algoritmu lze jednoznačně přiřadit neklesající funkci, která charakterizuje počet jeho operací v závislosti na rostoucí velikosti vstupních dat.
U této funkce je klíčové, že je možné ignorovat konstanty a také, že je vždy nejdůležitější člen s nejvyšším řádem. Tedy pokud má algoritmus časovou složitost , tak to lze zjednodušit na . To znamená tedy, že asymptotická mez je přibližná mez.
Dále platí i to, že každý problém lze sestavit ve větší časové složitosti (hůře to jde udělat vždy), ale naopak každý problém má minimální časovou a paměťovou složitost, pod kterou jej nelze vyřešit. Tuto mez lze pomocí matematických metod i dokázat.
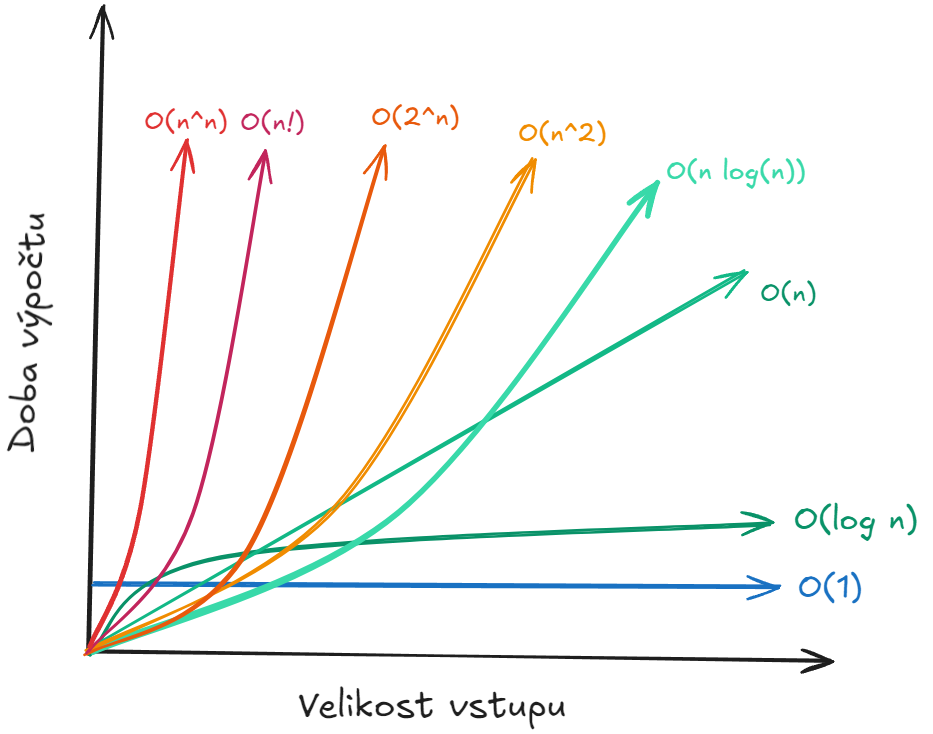
Notace velké
Určuje horní mez složitosti algoritmu.
| Zápis | Název | Příklad algoritmu |
|---|---|---|
| konstantní | Přístup k prvku v poli | |
| logaritmická | Binární vyhledávání | |
| lineární | Procházení seznamu | |
| lineárně-logaritmická | Efektivní řadící algoritmy (merge sort, quick sort průměrně) | |
| kvadratická | Vnořené smyčky (například bubble sort) | |
| exponenciální | Rekurzivní řešení problému obchodního cestujícího | |
| faktoriální | Hrubou silou generování permutací |
Asymptotické notace
| Značka | Název | Popis | Slovně |
|---|---|---|---|
| Horní mez (Upper Bound) | Algoritmus nebude horší než pro dostatečně velké | „nejhůře roste jako“ | |
| Horní mez nevčetně | Algoritmus roste pomaleji než | „roste pomaleji než“ | |
| Dolní mez (Lower Bound) | Algoritmus bude nejméně tak rychlý jako | „nejméně roste jako“ | |
| Dolní mez nevčetně | Algoritmus roste rychleji než | „roste rychleji než“ | |
| Střední mez (Theta) | Algoritmus roste přesně jako – horní i dolní mez shodné | „roste přibližně jako“ |
Ukázka asymptotické časové a prostorové složitosti algoritmu
V rámci příkladu je vytvořena kolekce DynamicArray, která reprezentuje dynamické pole, které mění svou velikost dle počtu prvků. Na kolekci jsou definovány operace:
Add- přidání prvku na první volné místo v kolekciRemove- odebrání prvku z indexu a zarovnání kolekce doleva tak, aby prvky tvořily souvislý blok.Get- získání prvku na indexu
Ukázka
using System;
public class DynamicArrayArray
{
private int[] data;
private int count;
public DynamicArrayArray()
{
data = new int[4]; // počáteční kapacita
count = 0;
}
public void Add(int value)
{
if (count == data.Length)
{
// zvětšit pole (například 2x větší)
int newCapacity = data.Length * 2;
int[] newData = new int[newCapacity];
Array.Copy(data, newData, data.Length);
data = newData;
}
data[count] = value;
count++;
}
public int Get(int index)
{
if (index < 0 || index >= count)
throw new IndexOutOfRangeException();
return data[index];
}
public void Remove(int index)
{
if (index < 0 || index >= count)
throw new IndexOutOfRangeException();
// posun zbylých prvků vlevo
for (int i = index; i < count - 1; i++)
{
data[i] = data[i + 1];
}
count--;
}
public int Count => count;
}
Prostorová složitost
Je nutné uložit prvků (resp. při zvětšování pole je potřebná velikost , ale konstanta se zanedbává). Není potřeba žádná paměť navíc, takže je asymptotická paměťová složitost .
Časová složitost
1. Get(index)
int value = array.Get(i);- je to přístup do pole
- známe index prvku, tedy jen získáme data na indexu. To lze udělat v konstantním čase, tj.
→ žádné prohledávání, žádné cykly
2. Remove(index)
array.Remove(i);- prvky na indexech větší než i se musí všechny posunout o jedno doleva
- Takovýchto prvků může být maximálnět tj. v nejhorším případě
Příklad:
| 0 | 1 | 2 | 3 |
|---|---|---|---|
| 10 | 20 | 30 | 40 |
- odeber index 1 (20)
- posune se 30 na místo 20, 40 na místo 30
Tedy:
- Remove na začátku →
- Remove na konci →
→ průměrně
3. Add(value)
if (count == data.Length)
{
int newCapacity = data.Length * 2;
int[] newData = new int[newCapacity];
Array.Copy(data, newData, data.Length);
data = newData;
}
data[count] = value;
count++;Dvě situace dle kapacity:
- Kapacita stačí - Hodnota se uloží za
- Kapacita nestačí - Zkopírování prvků → a přidání jednoho prvku
Amortizovaná časová složitost je . Tzn. limitně, kdy počet prvků jde do nekonečna, trvá přidání jednoho prvku konstantní čas.